How ARM64 Kernel Excpetion Mode Works
June 27, 2026 · View on GitHub
🚀 Practice & deep-dive on EmbeddedInterviewLab
Get these OS / Linux concepts as community-ranked interview questions with model answers, plus interactive deep-dive guides.
👉 Browse Embedded Linux & OS questions → · Browse the Embedded Linux guides →
How ARM64 Kernel Excpetion Mode Works
Exception Vetor Table of ARM aarch32

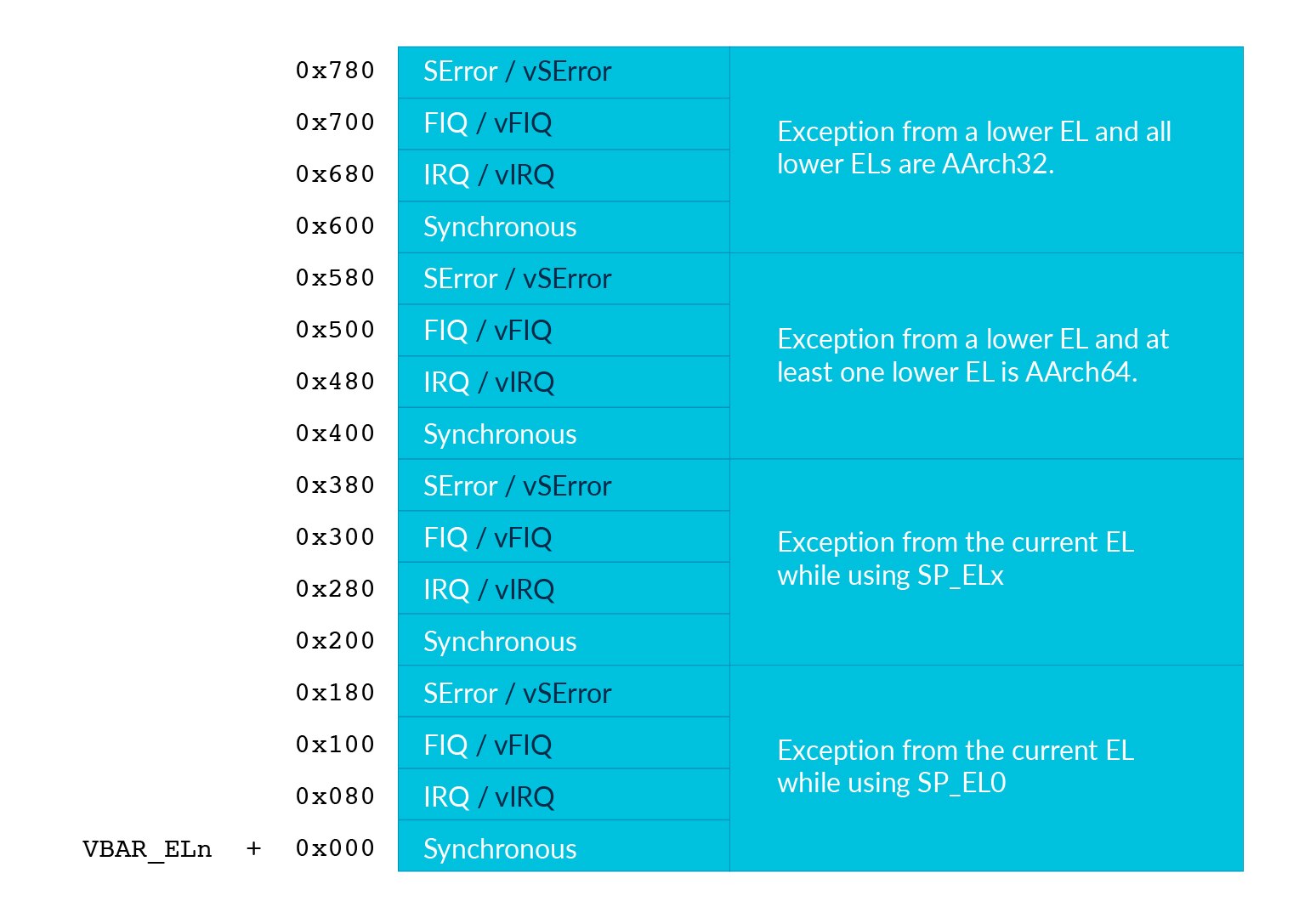
Exception Vetor Table of ARM aarch64
The following source codes are from Linux ARM64 3.18.102.
When Hardware generates an exception, kernel tries to find the entry on the vector table.
ENTRY(vectors)
ventry el1_sync_invalid // Synchronous EL1t
ventry el1_irq_invalid // IRQ EL1t
ventry el1_fiq_invalid // FIQ EL1t
ventry el1_error_invalid // Error EL1t
ventry el1_sync // Synchronous EL1h
ventry el1_irq // IRQ EL1h
ventry el1_fiq_invalid // FIQ EL1h
ventry el1_error_invalid // Error EL1h
ventry el0_sync // Synchronous 64-bit EL0
ventry el0_irq // IRQ 64-bit EL0
ventry el0_fiq_invalid // FIQ 64-bit EL0
ventry el0_error_invalid // Error 64-bit EL0
#ifdef CONFIG_COMPAT
ventry el0_sync_compat // Synchronous 32-bit EL0
ventry el0_irq_compat // IRQ 32-bit EL0
ventry el0_fiq_invalid_compat // FIQ 32-bit EL0
ventry el0_error_invalid_compat // Error 32-bit EL0
#else
ventry el0_sync_invalid // Synchronous 32-bit EL0
ventry el0_irq_invalid // IRQ 32-bit EL0
ventry el0_fiq_invalid // FIQ 32-bit EL0
ventry el0_error_invalid // Error 32-bit EL0
#endif
END(vectors)
For example, when the el0 synchrous abort happens, kernel searches el0_syn entry and find matched handler.
/*
* EL0 mode handlers.
*/
.align 6
el0_sync:
kernel_entry 0
mrs x25, esr_el1 // read the syndrome register
lsr x24, x25, #ESR_EL1_EC_SHIFT // exception class
cmp x24, #ESR_EL1_EC_SVC64 // SVC in 64-bit state
b.eq el0_svc
cmp x24, #ESR_EL1_EC_DABT_EL0 // data abort in EL0
b.eq el0_da
cmp x24, #ESR_EL1_EC_IABT_EL0 // instruction abort in EL0
b.eq el0_ia
cmp x24, #ESR_EL1_EC_FP_ASIMD // FP/ASIMD access
b.eq el0_fpsimd_acc
cmp x24, #ESR_EL1_EC_FP_EXC64 // FP/ASIMD exception
b.eq el0_fpsimd_exc
cmp x24, #ESR_EL1_EC_SYS64 // configurable trap
b.eq el0_undef
cmp x24, #ESR_EL1_EC_SP_ALIGN // stack alignment exception
b.eq el0_sp_pc
cmp x24, #ESR_EL1_EC_PC_ALIGN // pc alignment exception
b.eq el0_sp_pc
cmp x24, #ESR_EL1_EC_UNKNOWN // unknown exception in EL0
b.eq el0_undef
cmp x24, #ESR_EL1_EC_BREAKPT_EL0 // debug exception in EL0
b.ge el0_dbg
b el0_inv
#ifdef CONFIG_COMPAT
.align 6
el0_sync_compat:
kernel_entry 0, 32
mrs x25, esr_el1 // read the syndrome register
lsr x24, x25, #ESR_EL1_EC_SHIFT // exception class
cmp x24, #ESR_EL1_EC_SVC32 // SVC in 32-bit state
b.eq el0_svc_compat
cmp x24, #ESR_EL1_EC_DABT_EL0 // data abort in EL0
b.eq el0_da
cmp x24, #ESR_EL1_EC_IABT_EL0 // instruction abort in EL0
b.eq el0_ia
cmp x24, #ESR_EL1_EC_FP_ASIMD // FP/ASIMD access
b.eq el0_fpsimd_acc
cmp x24, #ESR_EL1_EC_FP_EXC32 // FP/ASIMD exception
b.eq el0_fpsimd_exc
cmp x24, #ESR_EL1_EC_UNKNOWN // unknown exception in EL0
b.eq el0_undef
cmp x24, #ESR_EL1_EC_CP15_32 // CP15 MRC/MCR trap
b.eq el0_undef
cmp x24, #ESR_EL1_EC_CP15_64 // CP15 MRRC/MCRR trap
b.eq el0_undef
cmp x24, #ESR_EL1_EC_CP14_MR // CP14 MRC/MCR trap
b.eq el0_undef
cmp x24, #ESR_EL1_EC_CP14_LS // CP14 LDC/STC trap
b.eq el0_undef
cmp x24, #ESR_EL1_EC_CP14_64 // CP14 MRRC/MCRR trap
b.eq el0_undef
cmp x24, #ESR_EL1_EC_BREAKPT_EL0 // debug exception in EL0
b.ge el0_dbg
b el0_inv
el0_svc_compat:
/*
* AArch32 syscall handling
*/
adr stbl, compat_sys_call_table // load compat syscall table pointer
uxtw scno, w7 // syscall number in w7 (r7)
mov sc_nr, #__NR_compat_syscalls
b el0_svc_naked
.align 6
el0_irq_compat:
kernel_entry 0, 32
b el0_irq_naked
#endif
el0_da:
/*
* Data abort handling
*/
mrs x26, far_el1
// enable interrupts before calling the main handler
enable_dbg_and_irq
ct_user_exit
clear_address_tag x0, x26
mov x1, x25
mov x2, sp
adr lr, ret_to_user
b do_mem_abort
el0_ia:
/*
* Instruction abort handling
*/
mrs x26, far_el1
// enable interrupts before calling the main handler
enable_dbg_and_irq
ct_user_exit
mov x0, x26
orr x1, x25, #1 << 24 // use reserved ISS bit for instruction aborts
mov x2, sp
adr lr, ret_to_user
b do_mem_abort
el0_fpsimd_acc:
/*
* Floating Point or Advanced SIMD access
*/
enable_dbg
ct_user_exit
mov x0, x25
mov x1, sp
adr lr, ret_to_user
b do_fpsimd_acc
el0_fpsimd_exc:
/*
* Floating Point or Advanced SIMD exception
*/
enable_dbg
ct_user_exit
mov x0, x25
mov x1, sp
adr lr, ret_to_user
b do_fpsimd_exc
el0_sp_pc:
/*
* Stack or PC alignment exception handling
*/
mrs x26, far_el1
// enable interrupts before calling the main handler
enable_dbg_and_irq
ct_user_exit
mov x0, x26
mov x1, x25
mov x2, sp
adr lr, ret_to_user
b do_sp_pc_abort
el0_undef:
/*
* Undefined instruction
*/
// enable interrupts before calling the main handler
enable_dbg_and_irq
ct_user_exit
mov x0, sp
adr lr, ret_to_user
b do_undefinstr
el0_dbg:
/*
* Debug exception handling
*/
tbnz x24, #0, el0_inv // EL0 only
mrs x0, far_el1
mov x1, x25
mov x2, sp
bl do_debug_exception
enable_dbg
ct_user_exit
b ret_to_user
el0_inv:
enable_dbg
ct_user_exit
mov x0, sp
mov x1, #BAD_SYNC
mrs x2, esr_el1
bl bad_el0_sync
b ret_to_user
ENDPROC(el0_sync)
For example, assume data abort is triggered. Kernel finds data abort handling and calls do_mem_abort function. LR register is written with ret_to_user function. Therefore when do_mem_abort function is completed, ret_to_user function is called.
el0_da:
/*
* Data abort handling
*/
mrs x26, far_el1
// enable interrupts before calling the main handler
enable_dbg_and_irq
ct_user_exit
clear_address_tag x0, x26
mov x1, x25
mov x2, sp
adr lr, ret_to_user
b do_mem_abort
For data abort, there are various fault handler functions that are defined in struct fault info. Kernel can call corresponding function according to strcut fault info address plus offset from esr register.
/*
* Dispatch a data abort to the relevant handler.
*/
asmlinkage void __exception do_mem_abort(unsigned long addr, unsigned int esr,
struct pt_regs *regs)
{
const struct fault_info *inf = fault_info + (esr & 63);
struct siginfo info;
if (!inf->fn(addr, esr, regs))
return;
pr_alert("Unhandled fault: %s (0x%08x) at 0x%016lx/n",
inf->name, esr, addr);
info.si_signo = inf->sig;
info.si_errno = 0;
info.si_code = inf->code;
info.si_addr = (void __user *)addr;
arm64_notify_die("", regs, &info, esr);
}
static struct fault_info {
int (*fn)(unsigned long addr, unsigned int esr, struct pt_regs *regs);
int sig;
int code;
const char *name;
} fault_info[] = {
{ do_bad, SIGBUS, 0, "ttbr address size fault" },
{ do_bad, SIGBUS, 0, "level 1 address size fault" },
{ do_bad, SIGBUS, 0, "level 2 address size fault" },
{ do_bad, SIGBUS, 0, "level 3 address size fault" },
{ do_translation_fault, SIGSEGV, SEGV_MAPERR, "input address range fault" },
{ do_translation_fault, SIGSEGV, SEGV_MAPERR, "level 1 translation fault" },
{ do_translation_fault, SIGSEGV, SEGV_MAPERR, "level 2 translation fault" },
{ do_page_fault, SIGSEGV, SEGV_MAPERR, "level 3 translation fault" },
{ do_bad, SIGBUS, 0, "reserved access flag fault" },
{ do_page_fault, SIGSEGV, SEGV_ACCERR, "level 1 access flag fault" },
{ do_page_fault, SIGSEGV, SEGV_ACCERR, "level 2 access flag fault" },
{ do_page_fault, SIGSEGV, SEGV_ACCERR, "level 3 access flag fault" },
{ do_bad, SIGBUS, 0, "reserved permission fault" },
{ do_page_fault, SIGSEGV, SEGV_ACCERR, "level 1 permission fault" },
{ do_page_fault, SIGSEGV, SEGV_ACCERR, "level 2 permission fault" },
{ do_page_fault, SIGSEGV, SEGV_ACCERR, "level 3 permission fault" },
{ do_bad, SIGBUS, 0, "synchronous external abort" },
{ do_bad, SIGBUS, 0, "asynchronous external abort" },
{ do_bad, SIGBUS, 0, "unknown 18" },
{ do_bad, SIGBUS, 0, "unknown 19" },
{ do_bad, SIGBUS, 0, "synchronous abort (translation table walk)" },
{ do_bad, SIGBUS, 0, "synchronous abort (translation table walk)" },
{ do_bad, SIGBUS, 0, "synchronous abort (translation table walk)" },
{ do_bad, SIGBUS, 0, "synchronous abort (translation table walk)" },
{ do_bad, SIGBUS, 0, "synchronous parity error" },
{ do_bad, SIGBUS, 0, "asynchronous parity error" },
{ do_bad, SIGBUS, 0, "unknown 26" },
{ do_bad, SIGBUS, 0, "unknown 27" },
{ do_bad, SIGBUS, 0, "synchronous parity error (translation table walk" },
{ do_bad, SIGBUS, 0, "synchronous parity error (translation table walk" },
{ do_bad, SIGBUS, 0, "synchronous parity error (translation table walk" },
{ do_bad, SIGBUS, 0, "synchronous parity error (translation table walk" },
{ do_bad, SIGBUS, 0, "unknown 32" },
{ do_bad, SIGBUS, BUS_ADRALN, "alignment fault" },
{ do_bad, SIGBUS, 0, "debug event" },
{ do_bad, SIGBUS, 0, "unknown 35" },
{ do_bad, SIGBUS, 0, "unknown 36" },
{ do_bad, SIGBUS, 0, "unknown 37" },
{ do_bad, SIGBUS, 0, "unknown 38" },
{ do_bad, SIGBUS, 0, "unknown 39" },
{ do_bad, SIGBUS, 0, "unknown 40" },
{ do_bad, SIGBUS, 0, "unknown 41" },
{ do_bad, SIGBUS, 0, "unknown 42" },
{ do_bad, SIGBUS, 0, "unknown 43" },
{ do_bad, SIGBUS, 0, "unknown 44" },
{ do_bad, SIGBUS, 0, "unknown 45" },
{ do_bad, SIGBUS, 0, "unknown 46" },
{ do_bad, SIGBUS, 0, "unknown 47" },
{ do_bad, SIGBUS, 0, "unknown 48" },
{ do_bad, SIGBUS, 0, "unknown 49" },
{ do_bad, SIGBUS, 0, "unknown 50" },
{ do_bad, SIGBUS, 0, "unknown 51" },
{ do_bad, SIGBUS, 0, "implementation fault (lockdown abort)" },
{ do_bad, SIGBUS, 0, "unknown 53" },
{ do_bad, SIGBUS, 0, "unknown 54" },
{ do_bad, SIGBUS, 0, "unknown 55" },
{ do_bad, SIGBUS, 0, "unknown 56" },
{ do_bad, SIGBUS, 0, "unknown 57" },
{ do_bad, SIGBUS, 0, "implementation fault (coprocessor abort)" },
{ do_bad, SIGBUS, 0, "unknown 59" },
{ do_bad, SIGBUS, 0, "unknown 60" },
{ do_bad, SIGBUS, 0, "unknown 61" },
{ do_bad, SIGBUS, 0, "unknown 62" },
{ do_bad, SIGBUS, 0, "unknown 63" },
};